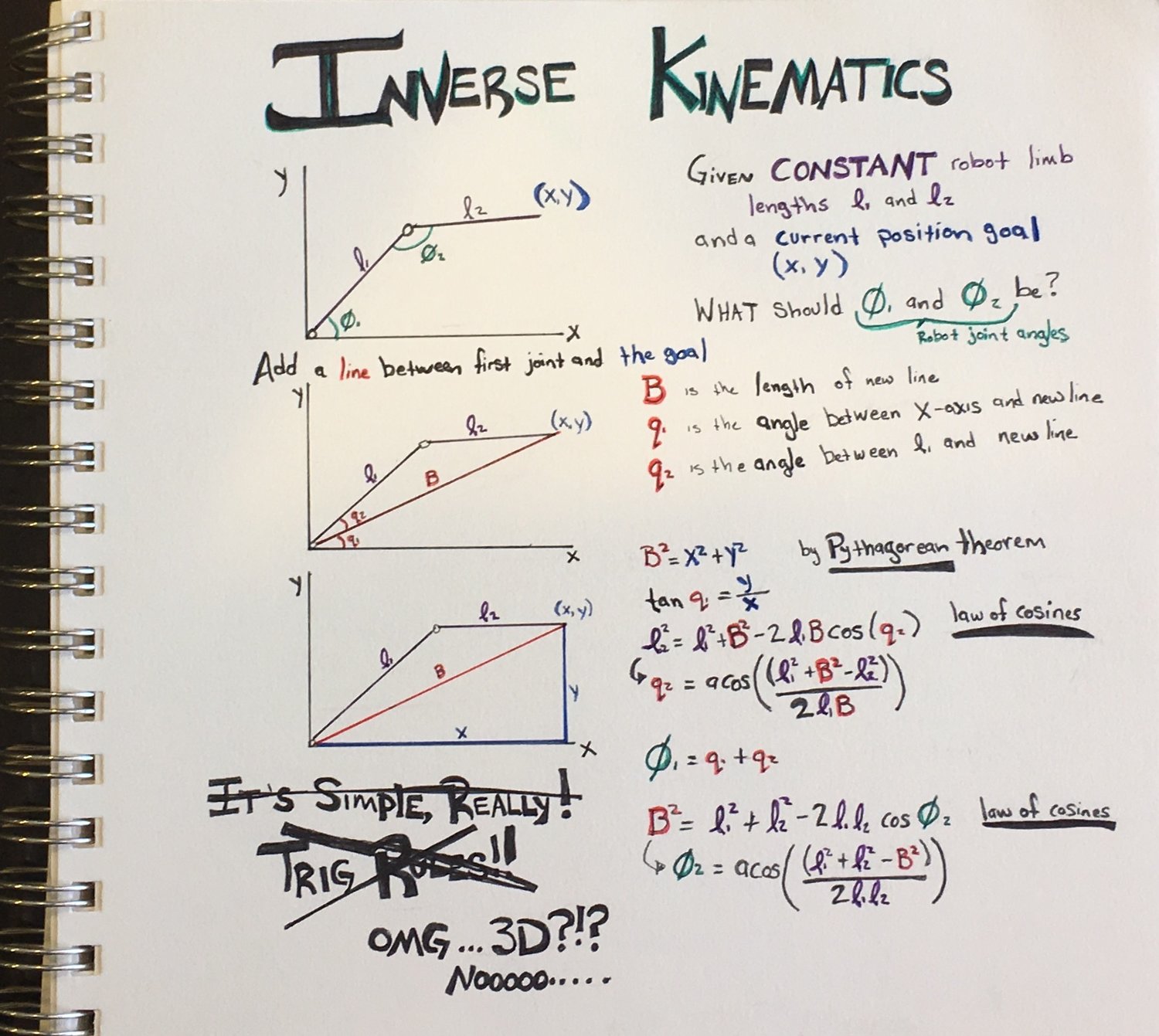
Inverse kinematics is a common robotics problem, it took both Wiki and this blog post to give me some understanding.
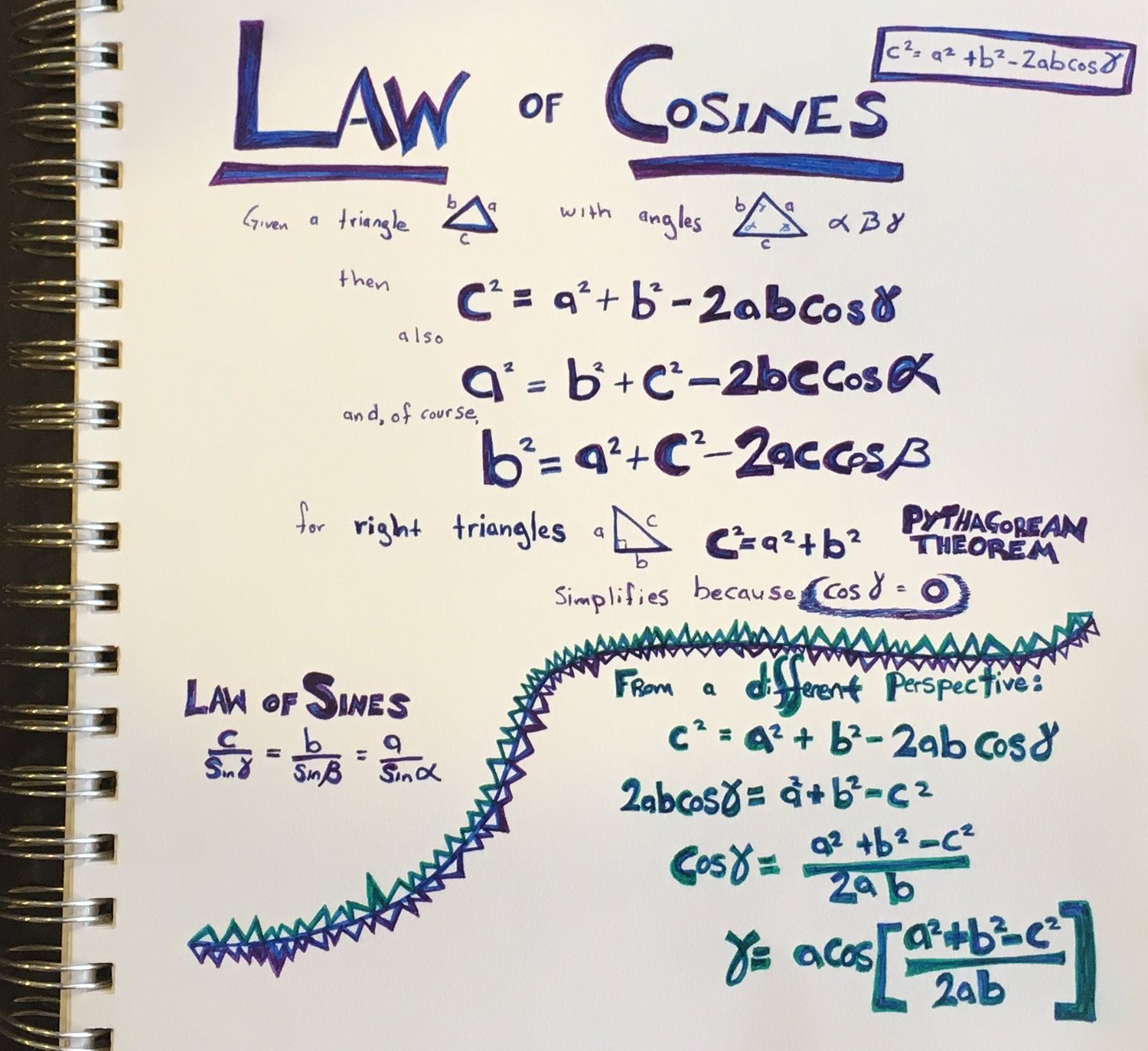
I wasn't sure about the Law of Cosines before starting to play with this so I made a drawing to imprint it into my brain.
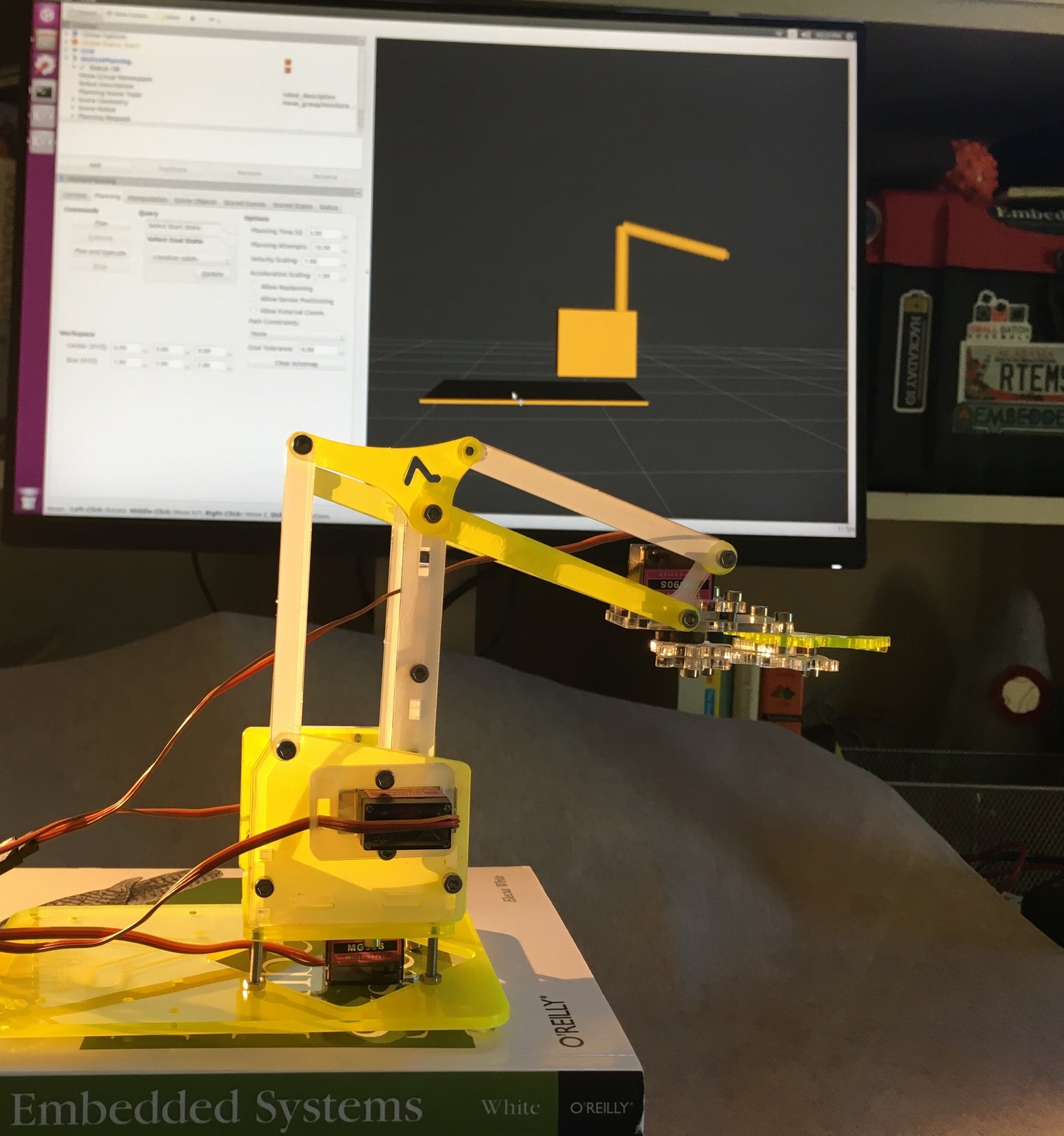
Robot Operating System (ROS) is the publisher-subscriber architecture and simulation system. (I wrote about ROS on this blog.) To learn about ROS, I read O'Reilly's Programming Robots with ROS and spent a fair about of time looking at the robots on the ROS wiki page.
I am using OpenCV in Python to track the laser. Their official tutorials are an excellent starting point. I recommend Adafruit's PCA9685 I2C PWM/Servo controller for interfacing the Jetson (or RPi) to the MeArm.
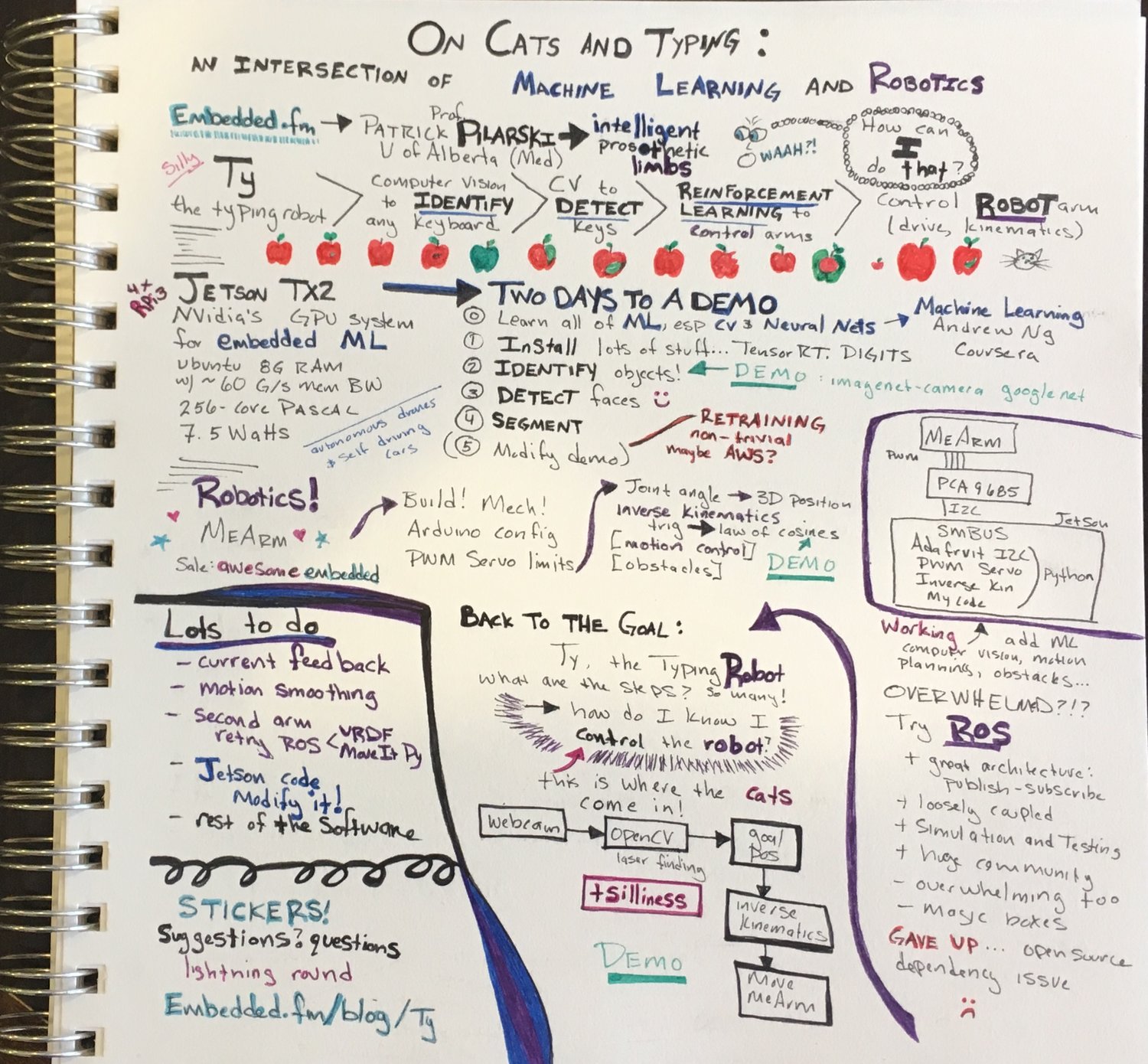
Finally, my talk notes and the Hackaday Poster!